En el interior del cuerpo de mariposa motorizado existe un motor de corriente directa DC, el cual trabaja con un sistema de inversión de polaridad, el cual nos permite el desplazamiento de la mariposa en uno y otro sentido. Se mueve en un sentido para abrir la mariposa y permitir la aceleración y en el otro para cerrarla y controlar la marcha mínima, puesto que el sistema de la mariposa se encuentra siempre ligeramente abierto, ya que si al presentarse una eventualidad de falla del sistema, no permitirá que se apague el motor.
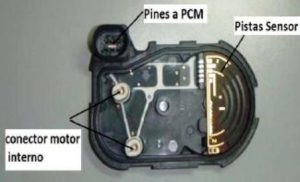
 Cuerpo de Mariposa Motorizado. Al interior del cuerpo del acelerador (PROCEDIMIENTO FUERA DEL MANUAL DE SERVICIO), se tiene que un motor mediante engrane que mueve el eje que soporta la placa del acelerador, este mismo engrane permite el movimiento de unas escobillas las cuales permiten funcionar el sistema de sensores, los cuales son resistencias variables tipo potenciómetro, en la figura se puede observar claramente este montaje.
Cuerpo de Mariposa Motorizado. Al interior del cuerpo del acelerador (PROCEDIMIENTO FUERA DEL MANUAL DE SERVICIO), se tiene que un motor mediante engrane que mueve el eje que soporta la placa del acelerador, este mismo engrane permite el movimiento de unas escobillas las cuales permiten funcionar el sistema de sensores, los cuales son resistencias variables tipo potenciómetro, en la figura se puede observar claramente este montaje.
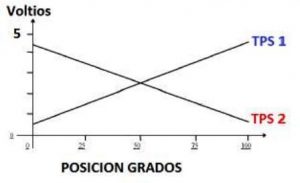
 La placa que va arriba de este montaje es la que contiene los sensores de posición, dos señales TPS1 y TPS 2, los cuales funcionan a través de un voltaje variable, pero uno ascendente y otro descendente, en la siguiente imagen se puede apreciar este montaje.
La placa que va arriba de este montaje es la que contiene los sensores de posición, dos señales TPS1 y TPS 2, los cuales funcionan a través de un voltaje variable, pero uno ascendente y otro descendente, en la siguiente imagen se puede apreciar este montaje.
Estas señales son voltajes inversas en voltaje y los dos sensores comparten los positivos y negativos.
La distribución de los pines en el conector se presenta de la siguiente manera:
 Pin 1: Señal TPS 1 voltaje ascendente 0.5 – 4V
Pin 1: Señal TPS 1 voltaje ascendente 0.5 – 4V
Pin 2: Masa del sensor.
Pin 3: Control motor, Masa para acelerar.
Pin 4: Señal TPS 2 voltaje descendente 4V – 0.5V.
Pin 5: Control Motor, pulsos 12V para acelerar.
Pin 6: Tensión de referencia 5V.





1 Comentario
Hola .. pregunto si alguien tiene plano conexión de mariposa de spin ficha plana de 6 pines